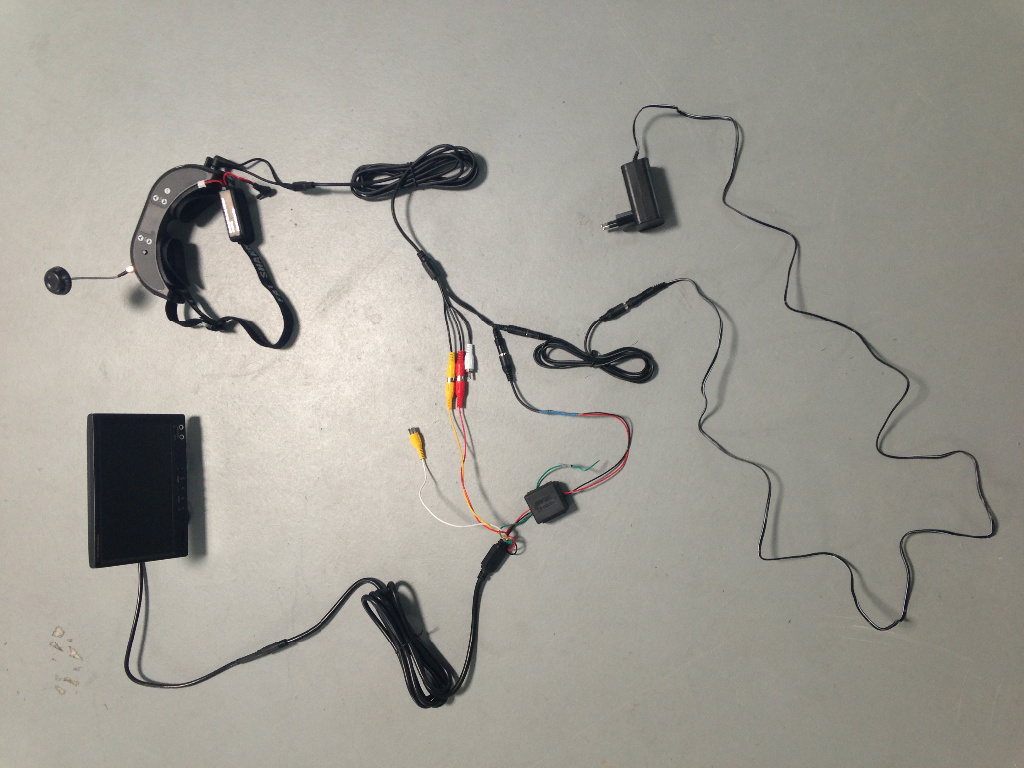
Nach meiner Anleitung zum FPV Setup an der Dji Phantom mit der Fatshark Dominator hier noch ein Nachtrag zur Optimierung der Rechweite durch die Optimierung der Antennenposition.
 Zu empfehlen ist in jedem Falle eine SpiroNet Antenne anstatt der mitgelieferten Stabantenne – da diese ein viel homogeneres (gleichmäßigeres) Empfangs- und Sendefeld hat – es ist also nicht wie bei einer Stabantenne auf eine Keule reduziert – sondern ist vielmehr halbkugelförmig. Wichtig zu verstehen für das Anbringen der Antenne ist, wie die Halbkugel der SpiroNet ausgerichtet ist. Die Abdeckung der Spironet hat ja selbst quasi die Form einer Halbkugel (oben nicht ganz rund – aber fast). So ist auch der Wirkungsbereich ausgerichtet.. in die Richtung oder auf der Hälfte, aus der das Kabel aus der Halbkugel kommt (quasi Rückseite der kleinen Halbkugel), ist fast keine Wirkung mehr. Da wir mit der Phantom aber in der Regel über / vor uns fliegen macht es also Sinn, die Halbkugel der Transmitter (Tx) Spironet gerade nach unten zu richten. Dadurch decken wir alles um und unter der DJI Phantom ab! Die Receiver (Rx) SpiroNet (an der Brille) hingegen sollte mit der Halbkugel gerade nach oben zeigen.
Zu empfehlen ist in jedem Falle eine SpiroNet Antenne anstatt der mitgelieferten Stabantenne – da diese ein viel homogeneres (gleichmäßigeres) Empfangs- und Sendefeld hat – es ist also nicht wie bei einer Stabantenne auf eine Keule reduziert – sondern ist vielmehr halbkugelförmig. Wichtig zu verstehen für das Anbringen der Antenne ist, wie die Halbkugel der SpiroNet ausgerichtet ist. Die Abdeckung der Spironet hat ja selbst quasi die Form einer Halbkugel (oben nicht ganz rund – aber fast). So ist auch der Wirkungsbereich ausgerichtet.. in die Richtung oder auf der Hälfte, aus der das Kabel aus der Halbkugel kommt (quasi Rückseite der kleinen Halbkugel), ist fast keine Wirkung mehr. Da wir mit der Phantom aber in der Regel über / vor uns fliegen macht es also Sinn, die Halbkugel der Transmitter (Tx) Spironet gerade nach unten zu richten. Dadurch decken wir alles um und unter der DJI Phantom ab! Die Receiver (Rx) SpiroNet (an der Brille) hingegen sollte mit der Halbkugel gerade nach oben zeigen.
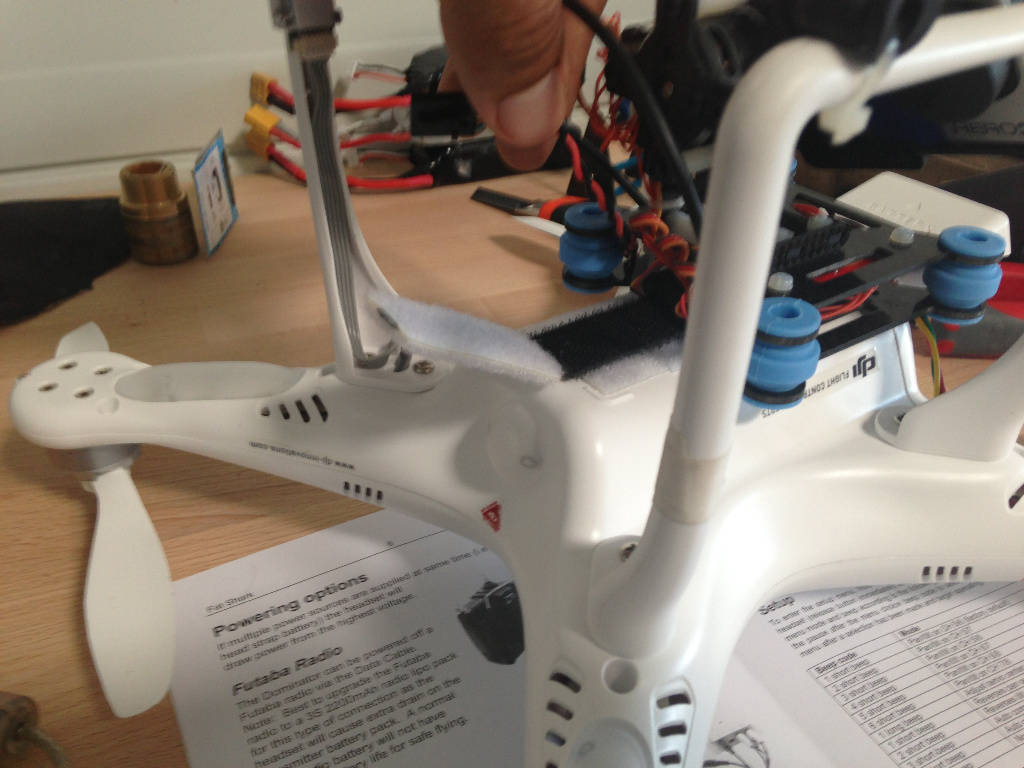
Bleibt noch ein Problem bei der Montage an der Phantom: Das Kabel der Antenne (eher ein Draht) ist recht kurz (und sollte auch nicht verlängert werden – da man sonst den Widerstand der Antenne verfälscht und die Antenne schwächt). Den Receiver direkt am Unterboden montiert, würde die SpiroNet Antenne noch zwischen dem Landegestell hängen. Soweit, so gut.. allerdings hängt dort auch unsere GoPro. Beim „Wegflug“ würde das toll funktionieren – beim Rückflug würde die Kamera aber die Antenne genau verdecken – die Funkwellen also abschatten – bei größerer Entfernung wäre das Bild also sofort weg.
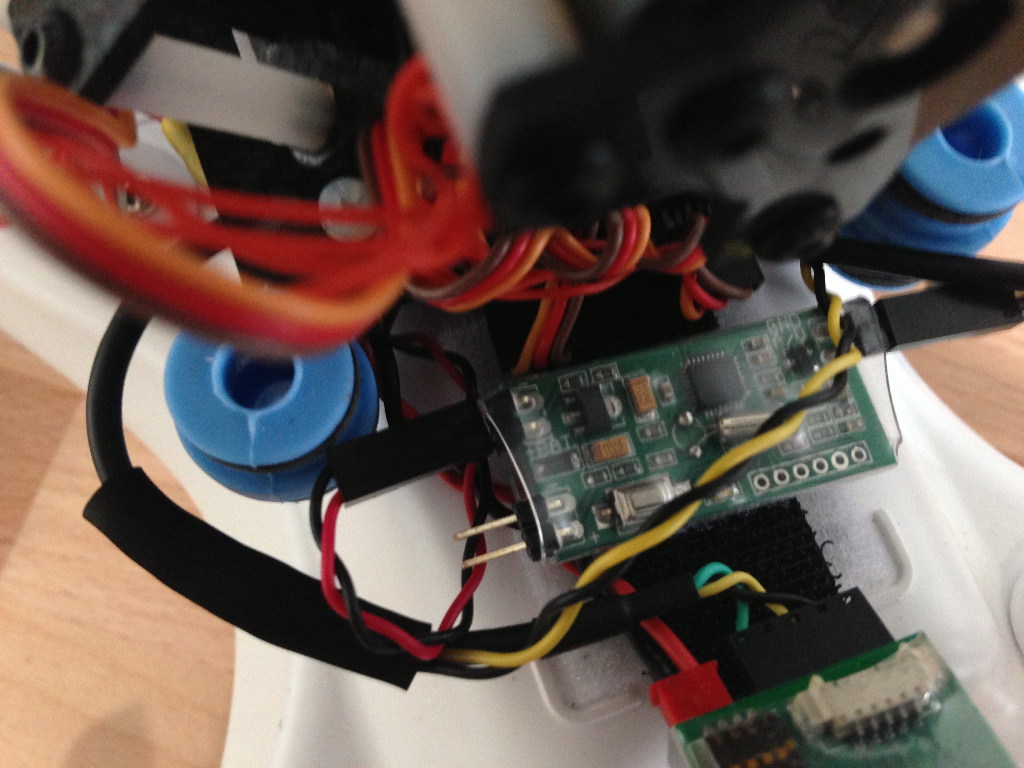
Hier ein Beispielbild der herkömmlichen „schlechten“ Montage:

Was also tun? Da wir die Antenne nicht verlängern können, müssen wir also den ganzen Receiver entsprechen weiter weg positioniert montieren..
Wir nehmen ein einfaches Blech- / Montageband oder ähnliches und schneiden uns ca. 8-10cm davon ab:

Mittig machen wir einen leichten aber sauberen Knick:
Wir benötigen dann noch Klettband (einmal Klett und einmal das Gegenstück – also dieses weiche Filzband, auf dem der Klett dann hält – gibt es im Baumarkt zusammen in einer Packung von Tesa). Auf die eine Hälfte kleben wir das Filz / Flies (hier weiß). Um die Haltbarkeit zu erhöhen, kleben wir genau auf die Rückseite des Blechbandes nochmal ein gleiches Stück:

Auf die andere Hälfte des Blechbandes kleben wir das Klett (hier schwarz) – ebenfalls auf der Rückseite verstärkt durch ein gleiches Stück.

Die Dji Phantom und den Transmitter haben wir schon vorher wie hier beschrieben auf die herkömmliche Weise mit Klettband präpariert. Nun können wir diesen Winkel an die Unterseite der Phantom kletten:

Und an den Winkel dann von unten des Transmitter ebenfalls an-kletten:

Die SpiroNet Antenne biegen wir dann vorsichtig und leicht genau so, daß diese quasi bei einem auf dem Boden stehenden Phantom kurz über dem Boden schwebt und genau nach unten zeigt:
Somit sollte die Antenne quasi nie großartig verdeckt werden und als Halbkugel nach unten und in alle Richtungen seitlich abstrahlen können.
Was ihr evtl bemekt: auf dem Rückflug (Phantom fliegt auf einen zu) und gleichzeitig schnellem Vorwärtsflug wird die Verbindung schlechter / bricht bei großer Entfernung ab. Dann keine Panik – einfach langsamer fliegen oder den Phantom etwas seidlich drehen. Die Ursache: der Quadrokopter neigt sich natürlich im Vorwärtsflug vorn runter (also hinten hoch) und kippt damit auch die Antenne (Halbkugel). Durch die Neigung ist man dann quasi „über dem Tellerrand“ / über dem Rand der Halbkugel (oberhalb) – dort wo die Antenne quasi nicht wirkt..
Diskussionen zu dem Thema und weitere Tipps zur Verbesserung der Reichweite der Phantom findet ihr hier.
Um Eure Restreichweite auch für den Rückflug optimal einschätzen zu können, empfehle ich die Installation eines OSD Moduls.
Meine eigenen Reichweitentests mit dem Dji Phantom findet ihr hier.
Wichtig für eine gute Reichweite vor allem bei all dem zusätzlichen Equipment ist natürlich auch die Wahl der Batterie / des LiPo Akkus. Der original DJI Akku reicht in der Regel nicht. Zwar ist durch den vorgegebenen Akku-Schacht kaum der Verbau eines Akkus mit höherer Kapazität möglich (beschränkt auf 2200 mAh – wie auch der original Akku), aber man sollte bei der Akku Auswahl unbedingt auf die Kapazität achten! Die Kapazität (angegeben in C) gibt die Menge an elektrischer Ladung an, die die Batterie liefern kann. Der orignal DJI LiPo Akku hat eine Kapazität von 20C – das genügt in der Regel für den Betrieb des Quadrokopters – wird aber sehr eng, wenn man noch zusätzliches Euipment mit Strom versorgen muss. Hier ist eine Kapazität von 35 C zu empfehlen! Das stellt sicher, daß alle Komponenten auch gleichzeitig mit genügend Strom versorgt werden können und die Spannung bis zum Schluss halbwegs stabil bleibt. Die folgenden Akkus von FeelTronic verwenden wir:

Im OSD (Spannungsanzeige) konnten wir feststellen, daß der original DJI Phantom Akku schon quasi ab dem Start Probleme hat und die Spannung stark anfängt zu schwanken, wenn an der Phantom zu viele zusätzliche elektronische Komponenten verbaut wurden. Mit derartigen Akkus besteht besagtes Problem nicht mehr.. der Akku ist lediglich etwas dicker und länger, passt aber noch knapp in den DJI Schacht. Sollte einem dies zu knapp sein, kann man alternativ auch auf eine größere Batteriefach-Klappe (Battery Door Upgrade) zurückgreifen, die es im Zubehörmarkt für die Phantom gibt.