
OSD bedeutet On Screen Display und ist die Überlagerung des eigenetlichen Videobildes mit zusätzlichen Inform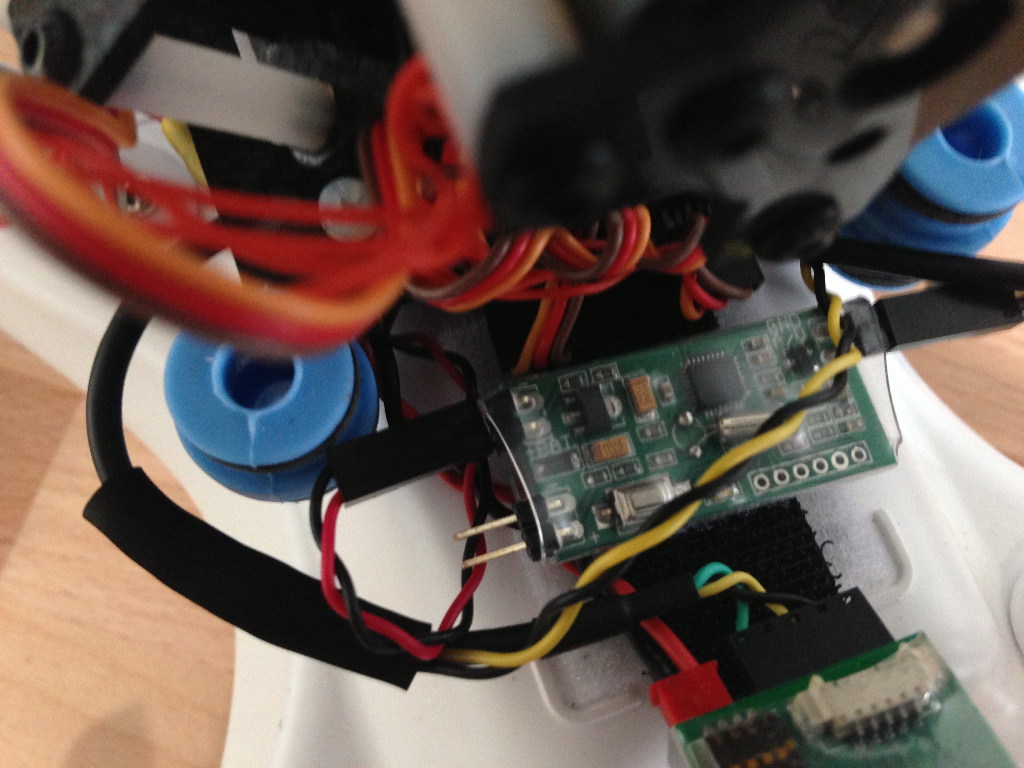 ationen. Ihr kennt das wohl am häufigsten von eurem heimischen Fernseher. Wenn ihr die Programmübersicht aufruft oder das EPG, dann seht ihr die aufgerufe Information über das Fernsehbild geblendet – oder schon allein beim Wechseln der Programme seht ihr meist dann kurz ein paar Sekunden, auf welchen Kanal ihr gewechselt habt. Das ist keine Information, die vom Sendeprogramm / Film selbst kommt, sondern eine Einblendung eures Receivers über das bestehende Videobild.
ationen. Ihr kennt das wohl am häufigsten von eurem heimischen Fernseher. Wenn ihr die Programmübersicht aufruft oder das EPG, dann seht ihr die aufgerufe Information über das Fernsehbild geblendet – oder schon allein beim Wechseln der Programme seht ihr meist dann kurz ein paar Sekunden, auf welchen Kanal ihr gewechselt habt. Das ist keine Information, die vom Sendeprogramm / Film selbst kommt, sondern eine Einblendung eures Receivers über das bestehende Videobild.
Die gleiche Technik können wir beim FPV (First Person View)-Flug nutzen, um wichtige Fluginformationen im Bild zu haben.. das Angebot reicht von einfachen aber wichtigen Infos (Flugzeit und/oder Batteriestatus (Voltanzeige)) bis hin zur Darstellung aufwendiger Flugdaten (GPS Position, Flugdate / Neigungen des Quadrokopters, Geschwindigkeit, Entfernung, Höhe, Drehzahl der Rotoren,..)
Ich persönlich habe mich im ersten Schritt für eine der einfachsten und günstigsten Lösungen entschieden – die aber die wichtigsten Informationen abdeckt:
- Flugzeit
- Akkustatud (=Votanzeige / Batteriespannung)
Das Modul dazu nennt sich „E-OSD“ oder „Super Simple Mini OSD“ von HobbyKing.com
Eine gesonderte Anleitung für die Installation am Phantom zusammen mit den Dji Zenmuse Gimbal (H3 2D) findet ihr hier.
Eigentlich hat das Modul nur 2 Anschlüsse (mit jeweils 2 PINs): einmal der Batterieanschluss (Power / Ground) – dieser versorgt das Modul gleichzeitig mit Strom und wird auch verwendet, um die Batteriespannung zu messen. Und dann noch der Video-Anschluss (Video / Ground) – dieser wird nicht durchgeschleift, sondern NACH der Kamera (GoPro Hero 3 oder andere) und VOR dem Video Transmitter (hier Fatshark / Immersion RC) einfach parallel in die Videoleitung gelötet (quasi eine Y-Abzweigung). Darüber speist das Modul dann die Overlay-Anzeige der Infos ein. Ich habe das Modul aktuell noch direkt hinter dem Gimbal und vor meinem FPV Fatshark / Immersion RC Transmitter verbaut – einfach mit Klettband. Später nach dem Umbau auf den Dji Zenmuse 2D Gimbal werde ich das Modul noch in die Dji Phantom Innereien verlegen.
Genial: mit dem kleinen Taster auf dem Modul kann man noch Einstellungen vornehmen – zum einen die Voltanzeige genau auf den eigenen Akku kalibrieren (eig entlich nicht nötig) – zum anderen aber die Anzeigeposition der Infos ändern. Dazu stehen viele verschiedene vordefinierte Positionen zur Verfügung – Option 18 ist optimal für die GoPro 3 – da dort dann die eingeblendeten Informationen (Volt und Flugzeit) nicht die GoPro eigenen OSD Infos überdecken (GoPro Akku-Status – Aufnahmedauer, WiFi Status etc etc). Die neuen Infos werden links unten und unten mittig eingeblendet – es sieht fast aus, als käme das von der GoPro selbst.. optimal.
entlich nicht nötig) – zum anderen aber die Anzeigeposition der Infos ändern. Dazu stehen viele verschiedene vordefinierte Positionen zur Verfügung – Option 18 ist optimal für die GoPro 3 – da dort dann die eingeblendeten Informationen (Volt und Flugzeit) nicht die GoPro eigenen OSD Infos überdecken (GoPro Akku-Status – Aufnahmedauer, WiFi Status etc etc). Die neuen Infos werden links unten und unten mittig eingeblendet – es sieht fast aus, als käme das von der GoPro selbst.. optimal.
Nun muss man selbst nur herausfinden, bei welchem Zeitpunkt und welcher LiPo-Akku-Spannung man am besten umkehrt oder zur Landung ansetzt.
In der Voreinstellung der Phantom startet ab / unter 10,9V der Failover Status 1 (rote LED blinkt) und ab unter 10,8V der Failover Status 2 (die Dji Phantom fängt an zu sinken).
Nimmt man nun die volle Akkuspannung nach dem Start (oft ca. 12,5V) und zieht die Spannung ab, bei der man spätestens wieder gelandet sein will (10,9V):
12,5V – 10,8V = 1,7V
..so hat man die Spannungsdifferenz, die man quasi „verfliegen“ kann. Geht man nun nicht  von einem Rundflug sondern einem HIn- und Rückflug aus und davon, daß der Rückweg und Hinweg gleich sind, so hat man von den 1,7V dann 0,85V für Hinflug und 0,85V für Rückflug (1,7 : 2).
von einem Rundflug sondern einem HIn- und Rückflug aus und davon, daß der Rückweg und Hinweg gleich sind, so hat man von den 1,7V dann 0,85V für Hinflug und 0,85V für Rückflug (1,7 : 2).
Von der vollen Akku ausgehend (12,5V) sollte man also spätestens dann umkehren, wenn die Anzeige auf unter 11,65V gesunken ist (12,5V – 0,85V). So kann man sich selbst seinen „Point of Return“ errechnen. Natürlich ist dabei etwaiger Gegenwind etc nicht mit eingerechnet und auch noch kein Puffer – das muss jeder für sich selbst austesten und Stück für Stück sich dem eigenen „point of no return“ nähern. Da man oft auf dem Hinflug auch steigen muss und auf dem Rückflug wieder sinken kann, habe ich für mich persönlich (ohne Gegenwind) einen „Point of no Return“ von 11,45 V gewählt, an dem ich mich orientiere..
Die Voltanzeige gibt definitiv ein viel besseres Indiz für den Status im Vergleich zur Flugzeit selbst – und man hat die Infos beim FPV-Flug immer direkt vor Auge.
Eine Übersicht meiner Reichweitentests findet ihr hier.
Fragen stellen zu dem Thema könnt ihr hier im Drohnen-Forum.